xdr2的XDR2 DRAM的设计精华——MT架构

XDR2在设计之初就着眼于图形显示卡应用领域,而在这一应用领域中,常用到的访问操作与PC机上的主内存有所不同,那就是经常会访问一些小容量的离散数据集合,因此有必要对这类应用进行优化。XDR2架构的一大创新就是针对这一操作进行架构优化,Rambus将其称之为微线程架构(Micro-Theaded,MT)。 对此,Rambus用原来的RDRAM架构与XDR2进行了对比。 我们知道,RDRAM有两个数据通道(Data Pins),每个通道位宽为8bit。RDRAM的一个逻辑Bank由两个子Bank组成,每个子Bank各接有一个数据通道,合计16bit。在工作时,两个子Bank同时寻址并将各自的数据传向数据通道A与数据通道B。如图1所示。 假设行寻址命令的间隔周期是8ns(指在发出行寻址命令8ns后才能向其他逻辑Bank发送新的行寻址命令),列命令间隔周期是4ns(发出列寻址命令4ns后才能向其他Bank发送新的列寻址命令),而数据通道中的传输周期为025ns(4GHz),由此计算出,在一次行访问间隔内,数据通道共传输了32次数据(8ns/025ns),数据通道A+B的位宽为16bit,因此共计512bit的数据,即64字节;而在一次列访问间隔中,共传送16次数据(4ns/025ns),数据通道A+B的总带宽为256bit,即32字节。这就是传统RDRAM结构所体现的一次行访问容量与一次列访问容量(也可称之为访问颗粒度),也就是说传统的RDRAM核心在一次行访问间隔中至少要传输64字节的数据,而在一次列访问间隔中,至少要传输32字节的数据。如图2所示。但是,在显卡的应用中,这样大的颗粒度往往会造成带宽的浪费,因为在访问一个图形对象时,一般用不到如此大的数据量,这与图形应用的特点有很大的关系。
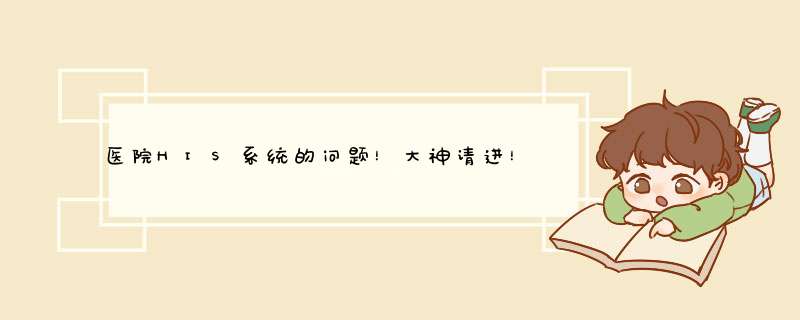
当我们把DRAM中的一行拿出来以列访问容量为单位做成一个二维表格时,我们就能清楚地看到显示卡在访问一个三角形的数据时所进行的寻址情况,如图3所示。假设需要访问的是由6个像素组成的三角形(3D绘图的基本单元就是不同大小的三角形),每个像素占用4个字节(典型的RGBA/32bit格式),那么,这6个像素组成的三角形就是24个字节的容量。 虽然对于一个列访问容量为32字节的DRAM架构来说,一个列访问容量就包括了一个三角形,但是,三角形的数据并不是存放于一个列中的,就像在屏幕中,组成三角形的像素不会是线性排列的一样,因此,在访问这些数据时,就需要访问多个列(因为图形数据是线性写入显存的,这就造成了三角形各像素是分布式存储的)。从图3可以看出,对于6像素的三角形来说,至少要访问2列,最多要访问4列,而对于4列来讲,就相当于读取128字节,但这其中只有24字节是需要的,其他的数据就白白地占用传输带宽与时间。所以,要想提高内存在显卡应用中的效率,在提升传输频率的同时还要有效降低访问颗粒度,而这就是MT架构的设计初衷。
想设计亿万级高并发架构,你要先知道高并发是什么?
面对流量高峰,不同的企业是如何通过技术手段解决高并发难题的呢
0、引言
软件系统有三个追求:高性能、高并发、高可用,俗称三高。三者既有区别也有联系,门门道道很多,全面讨论需要三天三夜,本篇讨论高并发。
高并发(High Concurrency)。并发是操作系统领域的一个概念,指的是一段时间内多任务流交替执行的现象,后来这个概念被泛化,高并发用来指大流量、高请求的业务情景,比如春运抢票,电商双十一,秒杀大促等场景。
很多程序员每天忙着搬砖,平时接触不到高并发,哪天受不了跑去面试,还常常会被面试官犀利的高并发问题直接KO,其实吧,高并发系统也不高深,我保证任何一个智商在线的看过这篇文章后,都能战胜恐惧,重拾生活的信心。
本文先介绍高并发系统的度量指标,然后讲述高并发系统的设计思路,再梳理高并发的关键技术,最后结合作者的经验做一些延伸探讨。
1、高并发的度量指标
既然是高并发系统,那并发一定要高,不然就名不副实。并发的指标一般有QPS、TPS、IOPS,这几个指标都是可归为系统吞吐率,QPS越高系统能hold住的请求数越多,但光关注这几个指标不够,我们还需要关注RT,即响应时间,也就是从发出request到收到response的时延,这个指标跟吞吐往往是此消彼长的,我们追求的是一定时延下的高吞吐。
比如有100万次请求,99万次请求都在10毫秒内响应,其他次数10秒才响应,平均时延不高,但时延高的用户受不了,所以,就有了TP90/TP99指标,这个指标不是求平均,而是把时延从小到大排序,取排名90%/99%的时延,这个指标越大,对慢请求越敏感。
除此之外,有时候,我们也会关注可用性指标,这可归到稳定性。
一般而言,用户感知友好的高并发系统,时延应该控制在250毫秒以内。
什么样的系统才能称为高并发?这个不好回答,因为它取决于系统或者业务的类型。不过我可以告诉你一些众所周知的指标,这样能帮助你下次在跟人扯淡的时候稍微靠点儿谱,不至于贻笑大方。
通常,数据库单机每秒也就能抗住几千这个量级,而做逻辑处理的服务单台每秒抗几万、甚至几十万都有可能,而消息队列等中间件单机每秒处理个几万没问题,所以我们经常听到每秒处理数百万、数千万的消息中间件集群,而像阿某的API网关,每日百亿请求也有可能。
2、高并发的设计思路
高并发的设计思路有两个方向:
垂直方向扩展,也叫竖向扩展
水平方向扩展,也叫横向扩展
垂直方向:提升单机能力
提升单机处理能力又可分为硬件和软件两个方面:
硬件方向,很好理解,花钱升级机器,更多核更高主频更大存储空间更多带宽
软件方向,包括用各快的数据结构,改进架构,应用多线程、协程,以及上性能优化各种手段,但这玩意儿天花板低,就像提升个人产出一样,996、007、最多24 X 7。
水平方向:分布式集群
为了解决分布式系统的复杂性问题,一般会用到架构分层和服务拆分,通过分层做隔离,通过微服务解耦。
这个理论上没有上限,只要做好层次和服务划分,加机器扩容就能满足需求,但实际上并非如此,一方面分布式会增加系统复杂性,另一方面集群规模上去之后,也会引入一堆AIOps、服务发现、服务治理的新问题。
因为垂直向的限制,所以,我们通常更关注水平扩展,高并发系统的实施也主要围绕水平方向展开。
3、高并发的关键技术
玩具式的网络服务程序,用户可以直连服务器,甚至不需要数据库,直接写磁盘文件。但春运购票系统显然不能这么做,它肯定扛不住这个压力,那一般的高并发系统是怎么做呢?比如某宝这样的正经系统是怎么处理高并发的呢?
其实大的思路都差不多,层次划分 + 功能划分。可以把层次划分理解为水平方向的划分,而功能划分理解为垂直方向的划分。
首先,用户不能直连服务器,要做分布式就要解决“分”的问题,有多个服务实例就需要做负载均衡,有不同服务类型就需要服务发现。
集群化:负载均衡
负载均衡就是把负载(request)均衡分配到不同的服务实例,利用集群的能力去对抗高并发,负载均衡是服务集群化的实施要素,它分3种:
DNS负载均衡,客户端通过URL发起网络服务请求的时候,会去DNS服务器做域名解释,DNS会按一定的策略(比如就近策略)把URL转换成IP地址,同一个URL会被解释成不同的IP地址,这便是DNS负载均衡,它是一种粗粒度的负载均衡,它只用URL前半部分,因为DNS负载均衡一般采用就近原则,所以通常能降低时延,但DNS有cache,所以也会更新不及时的问题。
硬件负载均衡,通过布置特殊的负载均衡设备到机房做负载均衡,比如F5,这种设备贵,性能高,可以支撑每秒百万并发,还能做一些安全防护,比如防火墙。
软件负载均衡,根据工作在ISO 7层网络模型的层次,可分为四层负载均衡(比如章文嵩博士的LVS)和七层负载均衡(NGINX),软件负载均衡配置灵活,扩展性强,阿某云的SLB作为服务对外售卖,Nginx可以对URL的后半部做解释承担API网关的职责。
所以,完整的负载均衡链路是 client <-> DNS负载均衡 -> F5 -> LVS/SLB -> NGINX
不管选择哪种LB策略,或者组合LB策略,逻辑上,我们都可以视为负载均衡层,通过添加负载均衡层,我们将负载均匀分散到了后面的服务集群,具备基础的高并发能力,但这只是万里长征第一步。
数据库层面:分库分表+读写分离
前面通过负载均衡解决了无状态服务的水平扩展问题,但我们的系统不全是无状态的,后面通常还有有状态的数据库,所以解决了前面的问题,存储有可能成为系统的瓶颈,我们需要对有状态存储做分片路由。
数据库的单机QPS一般不高,也就几千,显然满足不了高并发的要求。
所以,我们需要做分库分表 + 读写分离。
就是把一个库分成多个库,部署在多个数据库服务上,主库承载写请求,从库承载读请求。从库可以挂载多个,因为很多场景写的请求远少于读的请求,这样就把对单个库的压力降下来了。
如果写的请求上升就继续分库分表,如果读的请求上升就挂更多的从库,但数据库天生不是很适合高并发,而且数据库对机器配置的要求一般很高,导致单位服务成本高,所以,这样加机器抗压力成本太高,还得另外想招。
读多写少:缓存
缓存的理论依据是局部性原理。
一般系统的写入请求远少于读请求,针对写少读多的场景,很适合引入缓存集群。
在写数据库的时候同时写一份数据到缓存集群里,然后用缓存集群来承载大部分的读请求,因为缓存集群很容易做到高性能,所以,这样的话,通过缓存集群,就可以用更少的机器资源承载更高的并发。
缓存的命中率一般能做到很高,而且速度很快,处理能力也强(单机很容易做到几万并发),是理想的解决方案。
CDN本质上就是缓存,被用户大量访问的静态资源缓存在CDN中是目前的通用做法。
缓存也有很多需要谨慎处理的问题:
一致性问题:(a)更新db成功+更新cache失败 -> 不一致 (b)更新db失败+更新cache成功 -> 不一致 ©更新db成功+淘汰缓存失败 -> 不一致
缓存穿透:查询一定不存在的数据,会穿透缓存直接压到数据库,从而导致缓存失去作用,如果有人利用这个漏洞,大量查询一定不存在的数据,会对数据库造成压力,甚至打挂数据库。解决方案:布隆过滤器 或者 简单的方案,查询不存在的key,也把空结果写入缓存(设置较短的过期淘汰时间),从而降低命失
缓存雪崩:如果大量缓存在一个时刻同时失效,则请求会转到DB,则对DB形成压迫,导致雪崩。简单的解决方案是为缓存失效时间添加随机值,降低同一时间点失效淘汰缓存数,避免集体失效事件发生
但缓存是针对读,如果写的压力很大,怎么办?
高写入:消息中间件
同理,通过跟主库加机器,耗费的机器资源是很大的,这个就是数据库系统的特点所决定的。
相同的资源下,数据库系统太重太复杂,所以并发承载能力就在几千/s的量级,所以此时你需要引入别的一些技术。
比如说消息中间件技术,也就是MQ集群,它是非常好的做写请求异步化处理,实现削峰填谷的效果。
消息队列能做解耦,在只需要最终一致性的场景下,很适合用来配合做流控。
假如说,每秒是1万次写请求,其中比如5千次请求是必须请求过来立马写入数据库中的,但是另外5千次写请求是可以允许异步化等待个几十秒,甚至几分钟后才落入数据库内的。
那么此时完全可以引入消息中间件集群,把允许异步化的每秒5千次请求写入MQ,然后基于MQ做一个削峰填谷。比如就以平稳的1000/s的速度消费出来然后落入数据库中即可,此时就会大幅度降低数据库的写入压力。
业界有很多著名的消息中间件,比如ZeroMQ,rabbitMQ,kafka等。
消息队列本身也跟缓存系统一样,可以用很少的资源支撑很高的并发请求,用它来支撑部分允许异步化的高并发写入是很合适的,比使用数据库直接支撑那部分高并发请求要减少很多的机器使用量。
避免挤兑:流控
再强大的系统,也怕流量短事件内集中爆发,就像银行怕挤兑一样,所以,高并发另一个必不可少的模块就是流控。
流控的关键是流控算法,有4种常见的流控算法。
计数器算法(固定窗口):计数器算法是使用计数器在周期内累加访问次数,当达到设定的限流值时,触发限流策略,下一个周期开始时,进行清零,重新计数,实现简单。计数器算法方式限流对于周期比较长的限流,存在很大的弊端,有严重的临界问题。
滑动窗口算法:将时间周期分为N个小周期,分别记录每个小周期内访问次数,并且根据时间滑动删除过期的小周期,当滑动窗口的格子划分的越多,那么滑动窗口的滚动就越平滑,限流的统计就会越精确。此算法可以很好的解决固定窗口算法的临界问题。
漏桶算法:访问请求到达时直接放入漏桶,如当前容量已达到上限(限流值),则进行丢弃(触发限流策略)。漏桶以固定的速率进行释放访问请求(即请求通过),直到漏桶为空。分布式环境下实施难度高。
令牌桶算法:程序以r(r=时间周期/限流值)的速度向令牌桶中增加令牌,直到令牌桶满,请求到达时向令牌桶请求令牌,如获取到令牌则通过请求,否则触发限流策略。分布式环境下实施难度高。
4、高并发的实践经验
接入-逻辑-存储是经典的互联网后端分层,但随着业务规模的提高,逻辑层的复杂度也上升了,所以,针对逻辑层的架构设计也出现很多新的技术和思路,常见的做法包括系统拆分,微服务。
除此之外,也有很多业界的优秀实践,包括某信服务器通过协程(无侵入,已开源libco)改造,极大的提高了系统的并发度和稳定性,另外,缓存预热,预计算,批量读写(减少IO),池技术等也广泛应用在实践中,有效的提升了系统并发能力。
为了提升并发能力,逻辑后端对请求的处理,一般会用到生产者-消费者多线程模型,即I/O线程负责网络IO,协议编解码,网络字节流被解码后产生的协议对象,会被包装成task投入到task queue,然后worker线程会从该队列取出task执行,有些系统会用多进程而非多线程,通过共享存储,维护2个方向的shm queue,一个input q,一个output q,为了提高并发度,有时候会引入协程,协程是用户线程态的多执行流,它的切换成本更低,通常有更好的调度效率。
另外,构建漏斗型业务或者系统,从客户端请求到接入层,到逻辑层,到DB层,层层递减,过滤掉请求,Fail Fast(尽早发现尽早过滤),嘴大屁眼小,哈哈。
漏斗型系统不仅仅是一个技术模型,它也可以是一个产品思维,配合产品的用户分流,逻辑分离,可以构建全方位的立体模型。
5、小结
莫让浮云遮望眼,除去繁华识真颜。我们不能掌握了大方案,吹完了牛皮,而忽视了编程最本质的东西,掌握最基本最核心的编程能力,比如数据架构和算法,设计,惯用法,培养技术的审美,也是很重要的,既要致高远,又要尽精微。
GFS的新颖之处并不在于它采用了多么令人惊讶的新技术,而在于它采用廉价的商用计算机集群构建分布式文件系统,在降低成本的同时经受了实际应用的考验。
如上图所示,一个GFS包括一个主服务器(master)和多个块服务器(chunk server),这样一个GFS能够同时为多个客户端应用程序(Application)提供文件服务。文件被划分为固定的块,由主服务器安排存放到块服务器的本地硬盘上。主服务器会记录存放位置等数据,并负责维护和管理文件系统,包括块的租用、垃圾块的回收以及块在不同块服务器之间的迁移。此外,主服务器还周期性地与每个块服务器通过消息交互,以监视运行状态或下达命令。应用程序通过与主服务器和块服务器的交互来实现对应用数据的读写,应用与主服务器之间的交互仅限于元数据,也就是一些控制数据,其他的数据操作都是直接与块服务器交互的。这种控制与业务相分离的架构,在互联网产品方案上较为广泛,也较为成功。
⑷单master
只 有一个master也极大的简化了设计并使得master可以根据全局情况作出精密的块放置和复制决定。但是我们必须要将master对读和写的参与减至 最少,这样它才不会成为系统的瓶颈。Client从来不会从master读和写文件数据。Client只是询问master它应该和哪个 chunkserver联系。Client在一段限定的时间内将这些信息缓存,在后续的操作中Client直接和chunkserver交互。
以图1解释一下一个简单的读操作的交互。
⒈client使用固定的块大小将应用程序指定的文件名和字节偏移转换成文件的一个块索引(chunk index)。
⒉给master发送一个包含文件名和块索引的请求。
⒊master回应对应的chunk handle和副本的位置(多个副本)。
⒋client以文件名和块索引为键缓存这些信息。(handle和副本的位置)。
⒌Client 向其中一个副本发送一个请求,很可能是最近的一个副本。请求指定了chunk handle(chunkserver以chunk handle标识chunk)和块内的一个字节区间。
⒍除非缓存的信息不再有效(cache for a limited time)或文件被重新打开,否则以后对同一个块的读操作不再需要client和master间的交互。
通常Client可以在一个请求中询问多个chunk的地址,而master也可以很快回应这些请求。
⑸块规模
块规模是设计中的一个关键参数。我们选择的是64MB,这比一般的文件系统的块规模要大的多。每个块的副本作为一个普通的Linux文件存储,在需要的时候可以扩展。
块规模较大的好处有:
⒈减少client和master之间的交互。因为读写同一个块只是要在开始时向master请求块位置信息。对于读写大型文件这种减少尤为重要。即使对于访问少量数据的随机读操作也可以很方便的为一个规模达几个TB的工作集缓缓存块位置信息。
⒉Client在一个给定的块上很可能执行多个操作,和一个chunkserver保持较长时间的TCP连接可以减少网络负载。
⒊这减少了master上保存的元数据(metadata)的规模,从而使得可以将metadata放在内存中。这又会带来一些别的好处。
不利的一面:
一个小文件可能只包含一个块,如果很多Client访问该文件的话,存储这些块的chunkserver将成为访问的热点。但在实际应用中,应用程序通常顺序地读包含多个块的文件,所以这不是一个主要问题。
⑹元数据(metadata)
master 存储了三种类型的metadata:文件的名字空间和块的名字空间,从文件到块的映射,块的副本的位置。所有的metadata都放在内存中。前两种类型 的metadata通过向操作日志登记修改而保持不变,操作日志存储在master的本地磁盘并在几个远程机器上留有副本。使用日志使得我们可以很简单 地、可靠地更新master的状态,即使在master崩溃的情况下也不会有不一致的问题。相反,master在每次启动以及当有 chunkserver加入的时候询问每个chunkserver的所拥有的块的情况。
A、内存数据结构:
因为metadata存储在内存中,所以master的操作很快。进一步,master可以轻易而且高效地定期在后台扫描它的整个状态。这种定期地扫描被用于实现块垃圾收集、chunkserver出现故障时的副本复制、为平衡负载和磁盘空间而进行的块迁移。
这 种方法的一个潜在的问题就是块的数量也即整个系统的容量是否受限与master的内存。实际上,这并不是一个严重的问题。Master为每个 64MB的块维护的metadata不足64个字节。除了最后一块,文件所有的块都是满的。类似的,每个文件的名字空间数据也不足64个字节,因为文件名 是以一种事先确定的压缩方式存储的如果要支持更大的文件系统,那么增加一些内存的方法对于我们将元数据(metadata)保存在内存中所获得的简单 性、可靠性、高性能和灵活性来说,这只是一个很小的代价。
B、块位置:
master并不为chunkserver所拥有的块的副本的保存一个不变的记录。它在启动时通过简单的查询来获得这些信息。Master可以保持这些信息的更新,因为它控制所有块的放置并通过HeartBeat消息来监控chunkserver的状态。
这样做的好处:因为chunkserver可能加入或离开集群、改变路径名、崩溃、重启等,一个集群中有成百个server,这些事件经常发生,这种方法就排除了master与chunkserver之间的同步问题。
另一个原因是:只有chunkserver才能确定它自己到底有哪些块,由于错误,chunkserver中的一些块可能会很自然的消失,这样在master中就没有必要为此保存一个不变的记录。
C、操作日志:
操作日志包含了对metadata所作的修改的历史记录。它作为逻辑时间线定义了并发操作的执行顺序。文件、块以及它们的版本号都由它们被创建时的逻辑时间而唯一地、永久地被标识。
操作日志是如此的重要,我们必须要将它可靠地保存起来,并且只有在metadata的改变固定下来之后才将变化呈现给用户。所以我们将操作日志复制到数个远程的机器上,并且只有在将相应的日志记录写到本地和远程的磁盘上之后才回答用户的请求。
Master可以用操作日志来恢复它的文件系统的状态。为了将启动时间减至最小,日志就必须要比较小。每当日志的长度增长到超过一定的规模后,master就要检查它的状态,它可以从本地磁盘装入最近的检查点来恢复状态。
创 建一个检查点比较费时,master的内部状态是以一种在创建一个检查点时并不耽误即将到来的修改操作的方式来组织的。Master切换到一个新的日志文件并在一个单独的线程中创建检查点。这个新的检查点记录了切换前所有的修改。在一个有数十万文件的集群中用一分钟左右就能完成。创建完后,将它写入本地和 远程的磁盘。
⑺数据完整性
名字空间的修改必须是原子性的,它们只能有master处理:名字空间锁保证了操作的原子性和正确性,而master的操作日志在全局范围内定义了这些操作的顺序。
文件区间的状态在修改之后依赖于修改的类型,不论操作成功还是失败,也不论是不是并发操作。如果不论从哪个副本上读,所有的客户都看到同样的数据,那么文件 的这个区域就是一致的。如果文件的区域是一致的并且用户可以看到修改操作所写的数据,那么它就是已定义的。如果修改是在没有并发写操作的影响下完成的,那么受影响的区域是已定义的,所有的client都能看到写的内容。成功的并发写操作是未定义但却是一致的。失败的修改将使区间处于不一致的状态。
Write操作在应用程序指定的偏移处写入数据,而record append操作使得数据(记录)即使在有并发修改操作的情况下也至少原子性的被加到GFS指定的偏移处,偏移地址被返回给用户。
在一系列成功的修改操作后,最后的修改操作保证文件区域是已定义的。GFS通过对所有的副本执行同样顺序的修改操作并且使用块版本号检测过时的副本(由于chunkserver退出而导致丢失修改)来做到这一点。
因为用户缓存了会位置信息,所以在更新缓存之前有可能从一个过时的副本中读取数据。但这有缓存的截止时间和文件的重新打开而受到限制。
在修改操作成功后,部件故障仍可以是数据受到破坏。GFS通过master和chunkserver间定期的handshake,借助校验和来检测对数据的破坏。一旦检测到,就从一个有效的副本尽快重新存储。只有在GFS检测前,所有的副本都失效,这个块才会丢失。
楼主真的是个胆大,敢于追求前沿知识的人 一般人对这类问题更本就不关心(只知道电脑开机就能运行)
但是常人更本无法回答
只有按照书上的来了哦
只有在网上去COPY了 但是控制器,运算器,寄存器,中断处理系统这类 是要学习了汇编语言才能解释它们CPU如何调用内存执行指令的 单了解硬件是不行的 必须要了解汇编语言 你才能清楚计算机是怎么实现程序运行程序调用的 你可以去下点电子书或者买本书来看看(推荐王爽老师的 汇编语言)
呵呵说多了 下面是基本架构 当然 网上COPY的(其实这些在书上都能看到):
CPU是中央处理单元(Central Processing Unit)的缩写,它可以被简称做微处理器(Microprocessor),不过经常被人们直接称为处理器(processor)。不要因为这些简称而忽视它的作用,CPU是计算机的核心,其重要性好比大脑对于人一样,因为它负责处理、运算计算机内部的所有数据,而主板芯片组则更像是心脏,它控制着数据的交换。CPU的种类决定了你使用的操作系统和相应的软件。CPU主要由运算器、控制器、寄存器组和内部总线等构成,是PC的核心,再配上储存器、输入/输出接口和系统总线组成为完整的PC。
CPU的基本结构、功能及参数CPU主要由运算器、控制器、寄存器组和内部总线等构成。寄存器组用于在指令执行过后存放操作数和中间数据,由运算器完成指令所规定的运算及操作。
CPU主要的性能指标有:
1主频
主频也叫时钟频率,单位是MHz(或GHz),用来表示CPU的运算、处理数据的速度。CPU的主频=外频×倍频系数。很多人认为主频就决定着CPU的运行速度,这不仅是个片面的,而且对于服务器来讲,这个认识也出现了偏差。至今,没有一条确定的公式能够实现主频和实际的运算速度两者之间的数值关系,即使是两大处理器厂家Intel和AMD,在这点上也存在着很大的争议,我们从Intel的产品的发展趋势,可以看出Intel很注重加强自身主频的发展。像其他的处理器厂家,有人曾经拿过一块1G的全美达处理器来做比较,它的运行效率相当于2G的Intel处理器。
所以,CPU的主频与CPU实际的运算能力是没有直接关系的,主频表示在CPU内数字脉冲信号震荡的速度。在Intel的处理器产品中,我们也可以看到这样的例子:1 GHz Itanium芯片能够表现得差不多跟266 GHz Xeon/Opteron一样快,或是15 GHz Itanium 2大约跟4 GHz Xeon/Opteron一样快。CPU的运算速度还要看CPU的流水线、总线等等各方面的性能指标。
当然,主频和实际的运算速度是有关的,只能说主频仅仅是CPU性能表现的一个方面,而不代表CPU的整体性能。
2外频 外频是CPU的基准频率,单位是MHz。CPU的外频决定着整块主板的运行速度。通俗地说,在台式机中,我们所说的超频,都是超CPU的外频(当然一般情况下,CPU的倍频都是被锁住的)相信这点是很好理解的。但对于服务器CPU来讲,超频是绝对不允许的。前面说到CPU决定着主板的运行速度,两者是同步运行的,如果把服务器CPU超频了,改变了外频,会产生异步运行,(台式机很多主板都支持异步运行)这样会造成整个服务器系统的不稳定。
目前的绝大部分电脑系统中外频也是内存与主板之间的同步运行的速度,在这种方式下,可以理解为CPU的外频直接与内存相连通,实现两者间的同步运行状态。外频与前端总线(FSB)频率很容易被混为一谈,下面的前端总线介绍我们谈谈两者的区别。
3前端总线(FSB)频率 前端总线(FSB)频率(即总线频率)是直接影响CPU与内存直接数据交换速度。有一条公式可以计算,即数据带宽=(总线频率×数据位宽)/8,数据传输最大带宽取决于所有同时传输的数据的宽度和传输频率。比方,现在的支持64位的至强Nocona,前端总线是800MHz,按照公式,它的数据传输最大带宽是64GB/秒。
外频与前端总线(FSB)频率的区别:前端总线的速度指的是数据传输的速度,外频是CPU与主板之间同步运行的速度。也就是说,100MHz外频特指数字脉冲信号在每秒钟震荡一亿次;而100MHz前端总线指的是每秒钟CPU可接受的数据传输量是100MHz×64bit÷8bit/Byte=800MB/s。
其实现在“HyperTransport”构架的出现,让这种实际意义上的前端总线(FSB)频率发生了变化。之前我们知道IA-32架构必须有三大重要的构件:内存控制器Hub (MCH) ,I/O控制器Hub和PCI Hub,像Intel很典型的芯片组 Intel 7501、Intel7505芯片组,为双至强处理器量身定做的,它们所包含的MCH为CPU提供了频率为533MHz的前端总线,配合DDR内存,前端总线带宽可达到43GB/秒。但随着处理器性能不断提高同时给系统架构带来了很多问题。而“HyperTransport”构架不但解决了问题,而且更有效地提高了总线带宽,比方AMD Opteron处理器,灵活的HyperTransport I/O总线体系结构让它整合了内存控制器,使处理器不通过系统总线传给芯片组而直接和内存交换数据。这样的话,前端总线(FSB)频率在AMD Opteron处理器就不知道从何谈起了。
4、CPU的位和字长
位:在数字电路和电脑技术中采用二进制,代码只有“0”和“1”,其中无论是 “0”或是“1”在CPU中都是 一“位”。
字长:电脑技术中对CPU在单位时间内(同一时间)能一次处理的二进制数的位数叫字长。所以能处理字长为8位数据的CPU通常就叫8位的CPU。同理32位的CPU就能在单位时间内处理字长为32位的二进制数据。字节和字长的区别:由于常用的英文字符用8位二进制就可以表示,所以通常就将8位称为一个字节。字长的长度是不固定的,对于不同的CPU、字长的长度也不一样。8位的CPU一次只能处理一个字节,而32位的CPU一次就能处理4个字节,同理字长为64位的CPU一次可以处理8个字节。
5倍频系数
倍频系数是指CPU主频与外频之间的相对比例关系。在相同的外频下,倍频越高CPU的频率也越高。但实际上,在相同外频的前提下,高倍频的CPU本身意义并不大。这是因为CPU与系统之间数据传输速度是有限的,一味追求高倍频而得到高主频的CPU就会出现明显的“瓶颈”效应—CPU从系统中得到数据的极限速度不能够满足CPU运算的速度。一般除了工程样版的Intel的CPU都是锁了倍频的,而AMD之前都没有锁,现在AMD推出了黑盒版CPU(即不锁倍频版本,用户可以自由调节倍频,调节倍频的超频方式比调节外频稳定得多。)
6缓存
缓存大小也是CPU的重要指标之一,而且缓存的结构和大小对CPU速度的影响非常大,CPU内缓存的运行频率极高,一般是和处理器同频运作,工作效率远远大于系统内存和硬盘。实际工作时,CPU往往需要重复读取同样的数据块,而缓存容量的增大,可以大幅度提升CPU内部读取数据的命中率,而不用再到内存或者硬盘上寻找,以此提高系统性能。但是由于CPU芯片面积和成本的因素来考虑,缓存都很小。
L1 Cache(一级缓存)是CPU第一层高速缓存,分为数据缓存和指令缓存。内置的L1高速缓存的容量和结构对CPU的性能影响较大,不过高速缓冲存储器均由静态RAM组成,结构较复杂,在CPU管芯面积不能太大的情况下,L1级高速缓存的容量不可能做得太大。一般服务器CPU的L1缓存的容量通常在32—256KB。
L2 Cache(二级缓存)是CPU的第二层高速缓存,分内部和外部两种芯片。内部的芯片二级缓存运行速度与主频相同,而外部的二级缓存则只有主频的一半。L2高速缓存容量也会影响CPU的性能,原则是越大越好,以前家庭用CPU容量最大的是512KB,现在笔记本电脑中也可以达到2M,而服务器和工作站上用CPU的L2高速缓存更高,可以达到8M以上。
L3 Cache(三级缓存),分为两种,早期的是外置,现在的都是内置的。而它的实际作用即是,L3缓存的应用可以进一步降低内存延迟,同时提升大数据量计算时处理器的性能。降低内存延迟和提升大数据量计算能力对游戏都很有帮助。而在服务器领域增加L3缓存在性能方面仍然有显著的提升。比方具有较大L3缓存的配置利用物理内存会更有效,故它比较慢的磁盘I/O子系统可以处理更多的数据请求。具有较大L3缓存的处理器提供更有效的文件系统缓存行为及较短消息和处理器队列长度。
其实最早的L3缓存被应用在AMD发布的K6-III处理器上,当时的L3缓存受限于制造工艺,并没有被集成进芯片内部,而是集成在主板上。在只能够和系统总线频率同步的L3缓存同主内存其实差不了多少。后来使用L3缓存的是英特尔为服务器市场所推出的Itanium处理器。接着就是P4EE和至强MP。Intel还打算推出一款9MB L3缓存的Itanium2处理器,和以后24MB L3缓存的双核心Itanium2处理器。
但基本上L3缓存对处理器的性能提高显得不是很重要,比方配备1MB L3缓存的Xeon MP处理器却仍然不是Opteron的对手,由此可见前端总线的增加,要比缓存增加带来更有效的性能提升。
7CPU扩展指令集
CPU依靠指令来计算和控制系统,每款CPU在设计时就规定了一系列与其硬件电路相配合的指令系统。指令的强弱也是CPU的重要指标,指令集是提高微处理器效率的最有效工具之一。从现阶段的主流体系结构讲,指令集可分为复杂指令集和精简指令集两部分,而从具体运用看,如Intel的MMX(Multi Media Extended)、SSE、 SSE2(Streaming-Single instruction multiple data-Extensions 2)、SEE3和AMD的3DNow!等都是CPU的扩展指令集,分别增强了CPU的多媒体、图形图象和Internet等的处理能力。我们通常会把CPU的扩展指令集称为”CPU的指令集”。SSE3指令集也是目前规模最小的指令集,此前MMX包含有57条命令,SSE包含有50条命令,SSE2包含有144条命令,SSE3包含有13条命令。目前SSE3也是最先进的指令集,英特尔Prescott处理器已经支持SSE3指令集,AMD会在未来双核心处理器当中加入对SSE3指令集的支持,全美达的处理器也将支持这一指令集。
8CPU内核和I/O工作电压
从586CPU开始,CPU的工作电压分为内核电压和I/O电压两种,通常CPU的核心电压小于等于I/O电压。其中内核电压的大小是根据CPU的生产工艺而定,一般制作工艺越小,内核工作电压越低;I/O电压一般都在16~5V。低电压能解决耗电过大和发热过高的问题。
9制造工艺
制造工艺的微米是指IC内电路与电路之间的距离。制造工艺的趋势是向密集度愈高的方向发展。密度愈高的IC电路设计,意味着在同样大小面积的IC中,可以拥有密度更高、功能更复杂的电路设计。现在主要的180nm、130nm、90nm、65nm、45nm。最近官方已经表示有32nm的制造工艺了。
10指令集
(1)CISC指令集
CISC指令集,也称为复杂指令集,英文名是CISC,(Complex Instruction Set Computer的缩写)。在CISC微处理器中,程序的各条指令是按顺序串行执行的,每条指令中的各个操作也是按顺序串行执行的。顺序执行的优点是控制简单,但计算机各部分的利用率不高,执行速度慢。其实它是英特尔生产的x86系列(也就是IA-32架构)CPU及其兼容CPU,如AMD、VIA的。即使是现在新起的X86-64(也被成AMD64)都是属于CISC的范畴。
要知道什么是指令集还要从当今的X86架构的CPU说起。X86指令集是Intel为其第一块16位CPU(i8086)专门开发的,IBM1981年推出的世界第一台PC机中的CPU—i8088(i8086简化版)使用的也是X86指令,同时电脑中为提高浮点数据处理能力而增加了X87芯片,以后就将X86指令集和X87指令集统称为X86指令集。
虽然随着CPU技术的不断发展,Intel陆续研制出更新型的i80386、i80486直到过去的PII至强、PIII至强、Pentium 3,最后到今天的Pentium 4系列、至强(不包括至强Nocona),但为了保证电脑能继续运行以往开发的各类应用程序以保护和继承丰富的软件资源,所以Intel公司所生产的所有CPU仍然继续使用X86指令集,所以它的CPU仍属于X86系列。由于Intel X86系列及其兼容CPU(如AMD Athlon MP、)都使用X86指令集,所以就形成了今天庞大的X86系列及兼容CPU阵容。x86CPU目前主要有intel的服务器CPU和AMD的服务器CPU两类。
(2)RISC指令集
RISC是英文“Reduced Instruction Set Computing ” 的缩写,中文意思是“精简指令集”。它是在CISC指令系统基础上发展起来的,有人对CISC机进行测试表明,各种指令的使用频度相当悬殊,最常使用的是一些比较简单的指令,它们仅占指令总数的20%,但在程序中出现的频度却占80%。复杂的指令系统必然增加微处理器的复杂性,使处理器的研制时间长,成本高。并且复杂指令需要复杂的操作,必然会降低计算机的速度。基于上述原因,20世纪80年代RISC型CPU诞生了,相对于CISC型CPU ,RISC型CPU不仅精简了指令系统,还采用了一种叫做“超标量和超流水线结构”,大大增加了并行处理能力。RISC指令集是高性能CPU的发展方向。它与传统的CISC(复杂指令集)相对。相比而言,RISC的指令格式统一,种类比较少,寻址方式也比复杂指令集少。当然处理速度就提高很多了。目前在中高档服务器中普遍采用这一指令系统的CPU,特别是高档服务器全都采用RISC指令系统的CPU。RISC指令系统更加适合高档服务器的操作系统UNIX,现在Linux也属于类似UNIX的操作系统。RISC型CPU与Intel和AMD的CPU在软件和硬件上都不兼容。
目前,在中高档服务器中采用RISC指令的CPU主要有以下几类:PowerPC处理器、SPARC处理器、PA-RISC处理器、MIPS处理器、Alpha处理器。
(3)IA-64
EPIC(Explicitly Parallel Instruction Computers,精确并行指令计算机)是否是RISC和CISC体系的继承者的争论已经有很多,单以EPIC体系来说,它更像Intel的处理器迈向RISC体系的重要步骤。从理论上说,EPIC体系设计的CPU,在相同的主机配置下,处理Windows的应用软件比基于Unix下的应用软件要好得多。
Intel采用EPIC技术的服务器CPU是安腾Itanium(开发代号即Merced)。它是64位处理器,也是IA-64系列中的第一款。微软也已开发了代号为Win64的操作系统,在软件上加以支持。在Intel采用了X86指令集之后,它又转而寻求更先进的64-bit微处理器,Intel这样做的原因是,它们想摆脱容量巨大的x86架构,从而引入精力充沛而又功能强大的指令集,于是采用EPIC指令集的IA-64架构便诞生了。IA-64 在很多方面来说,都比x86有了长足的进步。突破了传统IA32架构的许多限制,在数据的处理能力,系统的稳定性、安全性、可用性、可观理性等方面获得了突破性的提高。
IA-64微处理器最大的缺陷是它们缺乏与x86的兼容,而Intel为了IA-64处理器能够更好地运行两个朝代的软件,它在IA-64处理器上(Itanium、Itanium2 ……)引入了x86-to-IA-64的解码器,这样就能够把x86指令翻译为IA-64指令。这个解码器并不是最有效率的解码器,也不是运行x86代码的最好途径(最好的途径是直接在x86处理器上运行x86代码),因此Itanium 和Itanium2在运行x86应用程序时候的性能非常糟糕。这也成为X86-64产生的根本原因。
(4)X86-64 (AMD64 / EM64T)
AMD公司设计,可以在同一时间内处理64位的整数运算,并兼容于X86-32架构。其中支持64位逻辑定址,同时提供转换为32位定址选项;但数据操作指令默认为32位和8位,提供转换成64位和16位的选项;支持常规用途寄存器,如果是32位运算操作,就要将结果扩展成完整的64位。这样,指令中有“直接执行”和“转换执行”的区别,其指令字段是8位或32位,可以避免字段过长。
x86-64(也叫AMD64)的产生也并非空穴来风,x86处理器的32bit寻址空间限制在4GB内存,而IA-64的处理器又不能兼容x86。AMD充分考虑顾客的需求,加强x86指令集的功能,使这套指令集可同时支持64位的运算模式,因此AMD把它们的结构称之为x86-64。在技术上AMD在x86-64架构中为了进行64位运算,AMD为其引入了新增了R8-R15通用寄存器作为原有X86处理器寄存器的扩充,但在而在32位环境下并不完全使用到这些寄存器。原来的寄存器诸如EAX、EBX也由32位扩张至64位。在SSE单元中新加入了8个新寄存器以提供对SSE2的支持。寄存器数量的增加将带来性能的提升。与此同时,为了同时支持32和64位代码及寄存器,x86-64架构允许处理器工作在以下两种模式:Long Mode(长模式)和Legacy Mode(遗传模式),Long模式又分为两种子模式(64bit模式和Compatibility mode兼容模式)。该标准已经被引进在AMD服务器处理器中的Opteron处理器
而今年也推出了支持64位的EM64T技术,再还没被正式命为EM64T之前是IA32E,这是英特尔64位扩展技术的名字,用来区别X86指令集。Intel的EM64T支持64位sub-mode,和AMD的X86-64技术类似,采用64位的线性平面寻址,加入8个新的通用寄存器(GPRs),还增加8个寄存器支持SSE指令。与AMD相类似,Intel的64位技术将兼容IA32和IA32E,只有在运行64位操作系统下的时候,才将会采用IA32E。IA32E将由2个sub-mode组成:64位sub-mode和32位sub-mode,同AMD64一样是向下兼容的。Intel的EM64T将完全兼容AMD的X86-64技术。现在Nocona处理器已经加入了一些64位技术,Intel的Pentium 4E处理器也支持64位技术。
应该说,这两者都是兼容x86指令集的64位微处理器架构,但EM64T与AMD64还是有一些不一样的地方,AMD64处理器中的NX位在Intel的处理器中将没有提供。
11超流水线与超标量
在解释超流水线与超标量前,先了解流水线(pipeline)。流水线是Intel首次在486芯片中开始使用的。流水线的工作方式就象工业生产上的装配流水线。在CPU中由5—6个不同功能的电路单元组成一条指令处理流水线,然后将一条X86指令分成5—6步后再由这些电路单元分别执行,这样就能实现在一个CPU时钟周期完成一条指令,因此提高CPU的运算速度。经典奔腾每条整数流水线都分为四级流水,即指令预取、译码、执行、写回结果,浮点流水又分为八级流水。
超标量是通过内置多条流水线来同时执行多个处理器,其实质是以空间换取时间。而超流水线是通过细化流水、提高主频,使得在一个机器周期内完成一个甚至多个操作,其实质是以时间换取空间。例如Pentium 4的流水线就长达20级。将流水线设计的步(级)越长,其完成一条指令的速度越快,因此才能适应工作主频更高的CPU。但是流水线过长也带来了一定副作用,很可能会出现主频较高的CPU实际运算速度较低的现象,Intel的奔腾4就出现了这种情况,虽然它的主频可以高达14G以上,但其运算性能却远远比不上AMD 12G的速龙甚至奔腾III。
12封装形式
CPU封装是采用特定的材料将CPU芯片或CPU模块固化在其中以防损坏的保护措施,一般必须在封装后CPU才能交付用户使用。CPU的封装方式取决于CPU安装形式和器件集成设计,从大的分类来看通常采用Socket插座进行安装的CPU使用PGA(栅格阵列)方式封装,而采用Slot x槽安装的CPU则全部采用SEC(单边接插盒)的形式封装。现在还有PLGA(Plastic Land Grid Array)、OLGA(Organic Land Grid Array)等封装技术。由于市场竞争日益激烈,目前CPU封装技术的发展方向以节约成本为主。
13、多线程
同时多线程Simultaneous multithreading,简称SMT。SMT可通过复制处理器上的结构状态,让同一个处理器上的多个线程同步执行并共享处理器的执行资源,可最大限度地实现宽发射、乱序的超标量处理,提高处理器运算部件的利用率,缓和由于数据相关或Cache未命中带来的访问内存延时。当没有多个线程可用时,SMT处理器几乎和传统的宽发射超标量处理器一样。SMT最具吸引力的是只需小规模改变处理器核心的设计,几乎不用增加额外的成本就可以显著地提升效能。多线程技术则可以为高速的运算核心准备更多的待处理数据,减少运算核心的闲置时间。这对于桌面低端系统来说无疑十分具有吸引力。Intel从306GHz Pentium 4开始,所有处理器都将支持SMT技术。
14、多核心
多核心,也指单芯片多处理器(Chip multiprocessors,简称CMP)。CMP是由美国斯坦福大学提出的,其思想是将大规模并行处理器中的SMP(对称多处理器)集成到同一芯片内,各个处理器并行执行不同的进程。与CMP比较, SMT处理器结构的灵活性比较突出。但是,当半导体工艺进入018微米以后,线延时已经超过了门延迟,要求微处理器的设计通过划分许多规模更小、局部性更好的基本单元结构来进行。相比之下,由于CMP结构已经被划分成多个处理器核来设计,每个核都比较简单,有利于优化设计,因此更有发展前途。目前,IBM 的Power 4芯片和Sun的 MAJC5200芯片都采用了CMP结构。多核处理器可以在处理器内部共享缓存,提高缓存利用率,同时简化多处理器系统设计的复杂度。
2005年下半年,Intel和AMD的新型处理器也将融入CMP结构。新安腾处理器开发代码为Montecito,采用双核心设计,拥有最少18MB片内缓存,采取90nm工艺制造,它的设计绝对称得上是对当今芯片业的挑战。它的每个单独的核心都拥有独立的L1,L2和L3 cache,包含大约10亿支晶体管。
15、SMP SMP(Symmetric Multi-Processing),对称多处理结构的简称,是指在一个计算机上汇集了一组处理器(多CPU),各CPU之间共享内存子系统以及总线结构。在这种技术的支持下,一个服务器系统可以同时运行多个处理器,并共享内存和其他的主机资源。像双至强,也就是我们所说的二路,这是在对称处理器系统中最常见的一种(至强MP可以支持到四路,AMD Opteron可以支持1-8路)。也有少数是16路的。但是一般来讲,SMP结构的机器可扩展性较差,很难做到100个以上多处理器,常规的一般是8个到16个,不过这对于多数的用户来说已经够用了。在高性能服务器和工作站级主板架构中最为常见,像UNIX服务器可支持最多256个CPU的系统。
构建一套SMP系统的必要条件是:支持SMP的硬件包括主板和CPU;支持SMP的系统平台,再就是支持SMP的应用软件。
为了能够使得SMP系统发挥高效的性能,操作系统必须支持SMP系统,如WINNT、LINUX、以及UNIX等等32位操作系统。即能够进行多任务和多线程处理。多任务是指操作系统能够在同一时间让不同的CPU完成不同的任务;多线程是指操作系统能够使得不同的CPU并行的完成同一个任务
要组建SMP系统,对所选的CPU有很高的要求,首先、CPU内部必须内置APIC(Advanced Programmable Interrupt Controllers)单元。Intel 多处理规范的核心就是高级可编程中断控制器(Advanced Programmable Interrupt Controllers–APICs)的使用;再次,相同的产品型号,同样类型的CPU核心,完全相同的运行频率;最后,尽可能保持相同的产品序列编号,因为两个生产批次的CPU作为双处理器运行的时候,有可能会发生一颗CPU负担过高,而另一颗负担很少的情况,无法发挥最大性能,更糟糕的是可能导致死机。
16、NUMA技术
NUMA即非一致访问分布共享存储技术,它是由若干通过高速专用网络连接起来的独立节点构成的系统,各个节点可以是单个的CPU或是SMP系统。在NUMA中,Cache 的一致性有多种解决方案,需要操作系统和特殊软件的支持。图2中是Sequent公司NUMA系统的例子。这里有3个SMP模块用高速专用网络联起来,组成一个节点,每个节点可以有12个CPU。像Sequent的系统最多可以达到64个CPU甚至256个CPU。显然,这是在SMP的基础上,再用NUMA的技术加以扩展,是这两种技术的结合。
17、乱序执行技术
乱序执行(out-of-orderexecution),是指CPU允许将多条指令不按程序规定的顺序分开发送给各相应电路单元处理的技术。这样将根据个电路单元的状态和各指令能否提前执行的具体情况分析后,将能提前执行的指令立即发送给相应电路单元执行,在这期间不按规定顺序执行指令,然后由重新排列单元将各执行单元结果按指令顺序重新排列。采用乱序执行技术的目的是为了使CPU内部电路满负荷运转并相应提高了CPU的运行程序的速度。分枝技术:(branch)指令进行运算时需要等待结果,一般无条件分枝只需要按指令顺序执行,而条件分枝必须根据处理后的结果,再决定是否按原先顺序进行。
18、CPU内部的内存控制器
许多应用程序拥有更为复杂的读取模式(几乎是随机地,特别是当cache hit不可预测的时候),并且没有有效地利用带宽。典型的这类应用程序就是业务处理软件,即使拥有如乱序执行(out of order execution)这样的CPU特性,也会受内存延迟的限制。这样CPU必须得等到运算所需数据被除数装载完成才能执行指令(无论这些数据来自CPU cache还是主内存系统)。当前低段系统的内存延迟大约是120-150ns,而CPU速度则达到了3GHz以上,一次单独的内存请求可能会浪费200-300次CPU循环。即使在缓存命中率(cache hit rate)达到99%的情况下,CPU也可能会花50%的时间来等待内存请求的结束- 比如因为内存延迟的缘故。
你可以看到Opteron整合的内存控制器,它的延迟,与芯片组支持双通道DDR内存控制器的延迟相比来说,是要低很多的。英特尔也按照计划的那样在处理器内部整合内存控制器,这样导致北桥芯片将变得不那么重要。但改变了处理器访问主存的方式,有助于提高带宽、降低内存延时和提升处理器性
制造工艺:现在CPU的制造工艺是035微米,最新的PII可以达到028微米,在将来的CPU制造工艺可以达到018微米。
参考资料:
http://baikebaiducom/view/2089htm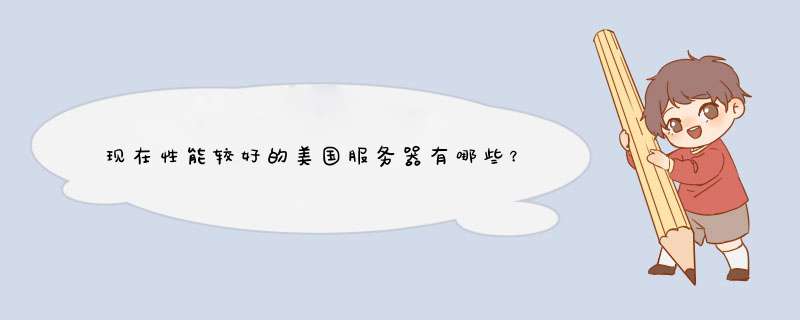



0条评论